洋上で位置を求める

ヨットが港を離れ、大海原に出て、陸が見えなくなったら、自分がどこを走っているか、どうやって知ればよいのでしょう。自分の現在地が分からなくては、どの方向に進めば目的地に着くかを知ることはできません。
<青海>が出航した1981年当時、外洋での位置決定方法には、一般的に以下のものがありました。
1・ロラン、オメガ等の利用
2・衛星航法装置(NNSS)を利用
3・六分儀による天測。
以下に詳しく見てみましょう。
●ロラン、オメガ等
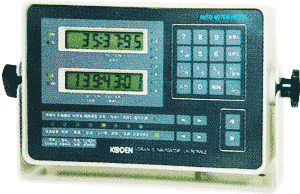 位置測定用に設置された電波発信局からの信号を、右写真のような装置で受信し、現在の緯度と経度を知る方法です。
位置測定用に設置された電波発信局からの信号を、右写真のような装置で受信し、現在の緯度と経度を知る方法です。
もともと、電子機器と専用の海図(ロラン・チャート等と呼ばれる)を組み合わせて使うものでしたが、電子機器にコンピュータが搭載されるようになってからは、緯度経度で位置を直接知ることが可能になりました。写真は光電製作所のカタログより転載しました。
オメガは全世界において利用可能とされ、地球を8つの電波発信局でカバーし、その一つが日本の対馬にあったことは有名です。オメガ塔と呼ばれる送信塔は、高さ455mほどもあり、対馬の住人の正月のあいさつは「おめがとう」だと聞きました。(なにかの間違いと思います)
●衛星航法装置(NNSS)
 上記のロランやオメガとともに、当時使われていた装置の一つが、NNSS(Navy Navigation Satellite System)です。これは軍事利用のために米国が開発したものです。1980年代にはヨットにも積載可能な小型受信機も普及しました。緯度と経度で位置が表示されます。
上記のロランやオメガとともに、当時使われていた装置の一つが、NNSS(Navy Navigation Satellite System)です。これは軍事利用のために米国が開発したものです。1980年代にはヨットにも積載可能な小型受信機も普及しました。緯度と経度で位置が表示されます。
しかし、<青海>がアメリカに着いた1981年時点で一台4000ドル以上したと思います。とても買える代物ではありませんでした。(当時の為替レートで100万円ほど)
でも、その数年後に南極に行く際、安全のためにぜひ欲しいと思いました。そこで、日本の航海機器メーカー、光電製作所にお願いしたところ、借用することができました。車1台分の値段だったと聞きました。
しかしながら、このNNSSというシステムは、現在のGPSのように便利なものではありません。1時間程度の間隔で衛星が飛んで来るのですが、その電波を受信して装置が位置を計算するまで、20分近くかかりました。1時間に1回程度、20分前にいた場所が分かる、しかも運が悪ければ2時間に1回かもしれないという、今では考えられない代物だったのです。
 1980年代後半になると、NNSS受信機の価格も下がり、大洋航海に出る多くのヨットが装備するようになりました。しかしながら、外洋ヨットの船内という劣悪な環境では、故障が多かったのも事実です。
1980年代後半になると、NNSS受信機の価格も下がり、大洋航海に出る多くのヨットが装備するようになりました。しかしながら、外洋ヨットの船内という劣悪な環境では、故障が多かったのも事実です。
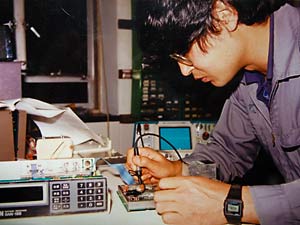
<青海>に積んだNNSSも、やはり故障しましたから、アフリカのケープタウンに寄港した際、修理屋に行ってオシロスコープなどを借りながら修理したのです。最初はICの故障を疑い、交換したものの、直りません。オシロスコープで信号の波形を確認しながら、やっと見つけた原因は、プリント基板のショートでした。おそらく、一滴の海水が原因と思われました。
●六分儀による天測

最後は、六分儀による天測です。<青海>が世界一周する間、一番使ったのがこの方法です。星や月や太陽の、水平線からの高度を測り、それをもとに計算して位置を求めます。精度があまり良くないと思っている人が多いようですが、太陽を測った場合、位置の誤差が2マイルを超えることは珍しく、ほとんどは0.5から1マイルの誤差に収まったように記憶しています。ただし、天気が悪いと測定できません。南大西洋で4日も嵐が続き、位置不明のまま走り続けていたとき、雲裏に薄く太陽の形が現れた瞬間がありました。それを逃さず測定し、位置が分かったときの嬉しさは、何物にもかえがたいものでした。
面倒なのは、測定値から位置を計算することです。足し算がほとんどなのですが、何度も表を開かなくてはならず、精神的に結構疲れるのです。
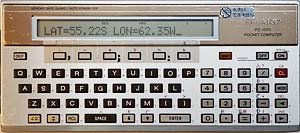
そこで、当時新発売のポケットコンピューターを使うことにしました。計算プログラムを作り、自動的に緯度経度を求めるようにしたのです。
ここまで書いたのですが、そろそろ除夜の鐘も鳴りやむ時刻となりました。もっと詳しい話は、またの機会に取っておきましょう。

それでは、2015年が皆様にとって、良い年となりますように。
ヨット<青海>より、お祈り申上げます。
All rights reserved.